为工程师充电 为小企业加油
| |

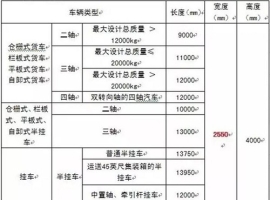 商用车新标落地!GB1589 为新能源 “
近期,道路运输车辆技术服务网启动《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》
商用车新标落地!GB1589 为新能源 “
近期,道路运输车辆技术服务网启动《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》
 全面焕新!新款别克 GL8 陆尊 PHEV v
新款别克 GL8 陆尊 PHEV今日发布, 在多个方面相比旧款都有一定的变化和升级,以下新
全面焕新!新款别克 GL8 陆尊 PHEV v
新款别克 GL8 陆尊 PHEV今日发布, 在多个方面相比旧款都有一定的变化和升级,以下新
 比亚迪将在马来西亚建设 CKD 工厂
2025 年 8 月 22 日,比亚迪在马来西亚举办全新比亚迪海豹上市发布会,并宣布将在当地
比亚迪将在马来西亚建设 CKD 工厂
2025 年 8 月 22 日,比亚迪在马来西亚举办全新比亚迪海豹上市发布会,并宣布将在当地
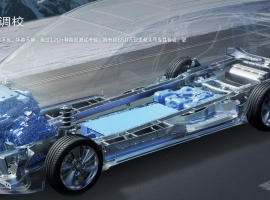
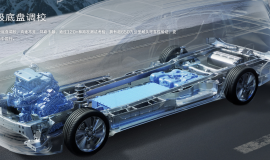
 电池包热失控防护:从 “被动降温”
在新能源汽车领域,动力电池热失控是安全核心难题,超 70% 的起火事件与之相关。传统
电池包热失控防护:从 “被动降温”
在新能源汽车领域,动力电池热失控是安全核心难题,超 70% 的起火事件与之相关。传统
 2025 年汽车行业新趋势,这些变化你
随着科技的飞速迭代,2025 年的汽车行业正经历着前所未有的变革。这些新趋势不仅重塑
2025 年汽车行业新趋势,这些变化你
随着科技的飞速迭代,2025 年的汽车行业正经历着前所未有的变革。这些新趋势不仅重塑



 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶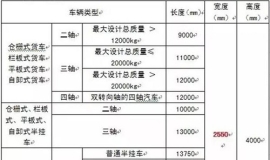

 关注公众号
关注公众号 添加客服微信
添加客服微信